
Me ka hoʻomohala ʻenehana o nā robots lawelawe, hoʻohana nui ʻia nā robots hoʻomaʻemaʻe wai ʻauʻau ma lalo o ka wai i ka mākeke.I mea e hoʻomaopopo i kā lākou ala hoʻolālā 'akomi, uku-pono a me ka adaptivekani ultrasonic lalo waiHe mea nui nā mea ʻike pale pale.
NuiMakeke
A hiki i kēia manawa, ʻo ʻAmelika ʻAmelika ka mākeke nui loa i ka hoʻomohala ʻana i ka mākeke wai honua (Technavio Market Report, 2019-2024).Aia ma mua o 10.7 miliona mau loko ʻauʻau ma ʻAmelika Hui Pū ʻIa, a ke piʻi nei ka nui o nā loko hou, ʻo ka nui o nā loko pilikino, ke piʻi nei i kēlā me kēia makahiki, me ka piʻi ʻana o 117,000 i 2021. ʻO ka awelika o hoʻokahi loko no kēlā me kēia 31 poʻe.Ma Palani, ka lua o ka lua o na loko wai makeke, ua oi aku ka nui o na loko wai ma 3.2 miliona ma 2022. A ua hiki i ka 244,000 ka nui o na loko wai hou i ka makahiki hookahi, me ka awelika o hookahi punawai no kela 21 kanaka.
Ma ka mākeke Kina, ka mea i hoʻomalu ʻia e nā loko ʻauʻau lehulehu, ʻo ka awelika o kahi 43,000 poʻe e kaʻana i kahi haʻuki ʻauʻau (aia he 32,500 mau loko ʻauʻau ma ka ʻāina, e pili ana i ka heluna kanaka o 1.4 biliona).
Aia ʻo Sepania i ka hā o ka nui o nā loko ʻauʻau ma ka honua a ʻo ka lua o ka helu kiʻekiʻe loa o nā loko ʻauʻau ma ʻEulopa, me 1.3 miliona mau loko wai (noho, lehulehu a hui pū kekahi).
Mai ka honua——China pool robot market hoʻohālikelike, ʻo ka nui o ka mākeke Kina ma lalo o 1% o ka honua, ʻo ka mākeke nui ʻo ʻEulopa a me ʻAmelika Hui Pū ʻIa.Hōʻike ka ʻikepili i ka makahiki 2021, ʻo ka nui o ka mākeke wai wai honua ma kahi o 11.2 biliona RMB, kūʻai aku ʻoi aku ma mua o 1.6 miliona mau ʻāpana, ʻo ʻAmelika Hui Pū ʻIa pūnaewele wale nō.ʻO nā moku ʻauʻau hoʻomaʻemaʻe robot ua hōʻea ma mua o 500,000 mau ʻāpana i 2021. A ʻoi aku ka nui o kā lākou ulu ʻana ma mua o 130%, no ka wā mua o ka ulu wikiwiki.
I kēia manawa, ua hoʻomalu ʻia ka mākeke hoʻomaʻemaʻe wai e ka hoʻomaʻemaʻe manual, a ma ka mākeke hoʻomaʻemaʻe ʻauʻau honua, ʻo ka hoʻomaʻemaʻe ʻana i ka manual e pili ana i 45%, ʻoiai ʻo ka ʻauʻau hoʻomaʻemaʻe lopako helu no kahi o 19%.I ka wā e hiki mai ana, me ka piʻi ʻana o nā koina hana a me ka hoʻolaha ʻana o nā ʻenehana ʻoihana e like me ka ʻike ʻike, ka ʻike ultrasonic, ka hoʻolālā ala akamai, ka Pūnaewele o nā mea, SLAM (ka hoʻonohonoho koke ʻana a me ka ʻenehana kūkulu palapala) a me nā ʻenehana pili ʻē aʻe, nā robots hoʻomaʻemaʻe wai ʻauʻau. E hoʻololi mālie ʻia mai ka hana a hiki i ka naʻauao, a e hoʻomaikaʻi hou ʻia ka piʻi ʻana o nā robots hoʻomaʻemaʻe wai.
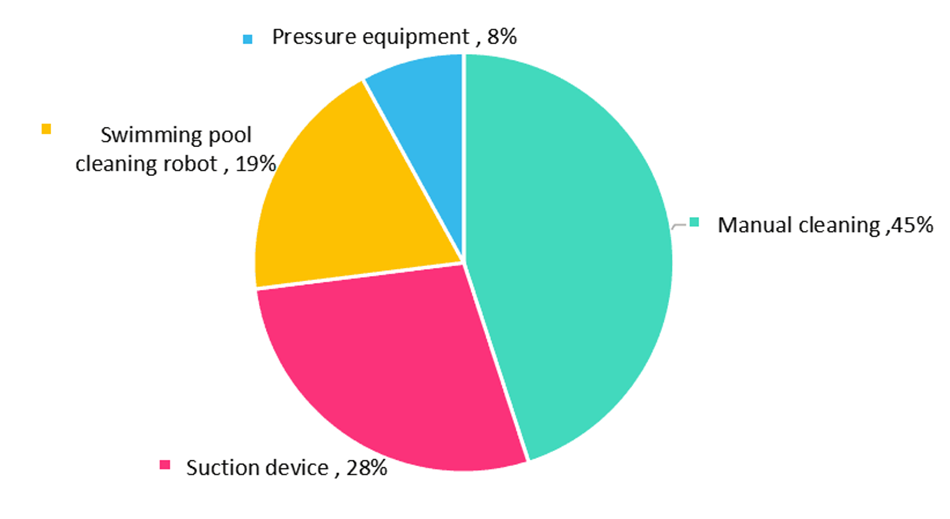
ʻO ka mākeke hoʻomaʻemaʻe ʻauʻau honua holoʻokoʻa i ka makahiki 2021
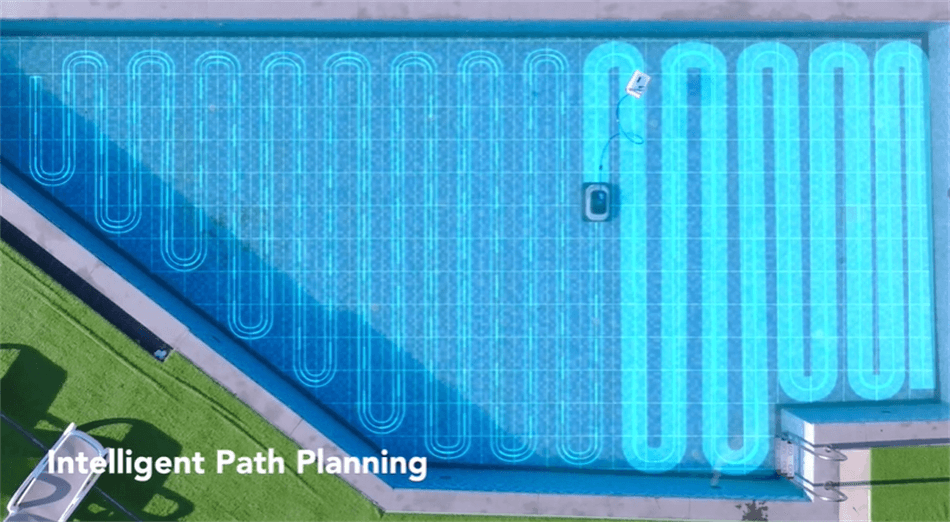
ʻO ka ʻike hoʻolaʻa ʻana, nā mea kani ma lalo o ka wai e kōkua i kaʻauʻaulopako hoʻomaʻemaʻe loko e pale i nā pilikia me ka naʻauao
ʻO ka ultrasonic underwater distance ana obstacle avoidance sensor he ʻano mea ʻike i hoʻohana ʻia i ka pale ʻana i ka pale i lalo o ka wai.Hoʻohana ka mea ʻike i ka ʻenehana no ke ana ʻana i ka mamao ma waena o ka mea ʻike a me ka mea i ana ʻia.Ke ʻike ka mea ʻike i kahi pilikia, e hoʻihoʻi ʻia ka mamao o ka pale i ka robot, a hiki i ka robot ke kū, huli, lohi, hoʻokele i ka pā, piʻi i ka pā a me nā hana ʻē aʻe e like me ke kuhikuhi i kau ʻia e ka sensor a me ka hoʻihoʻi. waiwai mamao e hoʻomaopopo i ke kumu o ka hoʻomaʻemaʻe ʻana i ka wai ʻauʻau a me ka pale ʻana i ka pilikia.
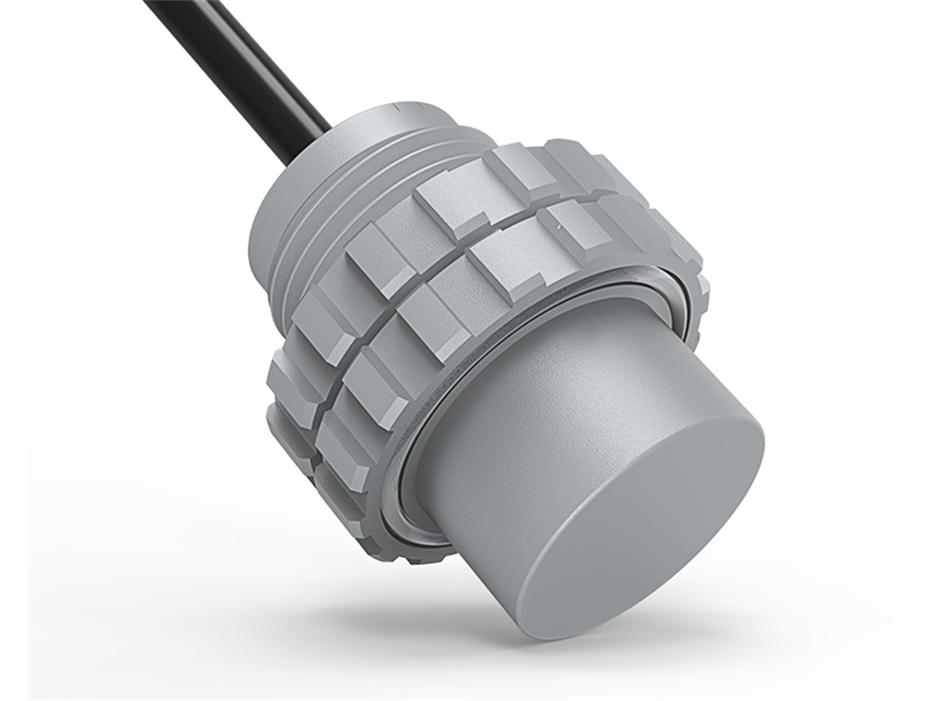
It hele maihmua——L08 i lalo o ka wai hoʻoneʻe ʻia
ʻO ka hoʻolālā mua o ka DSP sensor, ka noiʻi kūʻokoʻa a me ka hoʻomohala ʻana i nā mea ʻike ma lalo o ka wai, ma o ka hoʻonohonoho ʻana o nā mea ʻike ma lalo o ka wai i loko o ka lopako lalo wai, i loaʻa i ka lopako hoʻomaʻemaʻe wai ʻauʻau ka mea e pale ai i ka hana ala hoʻolālā.
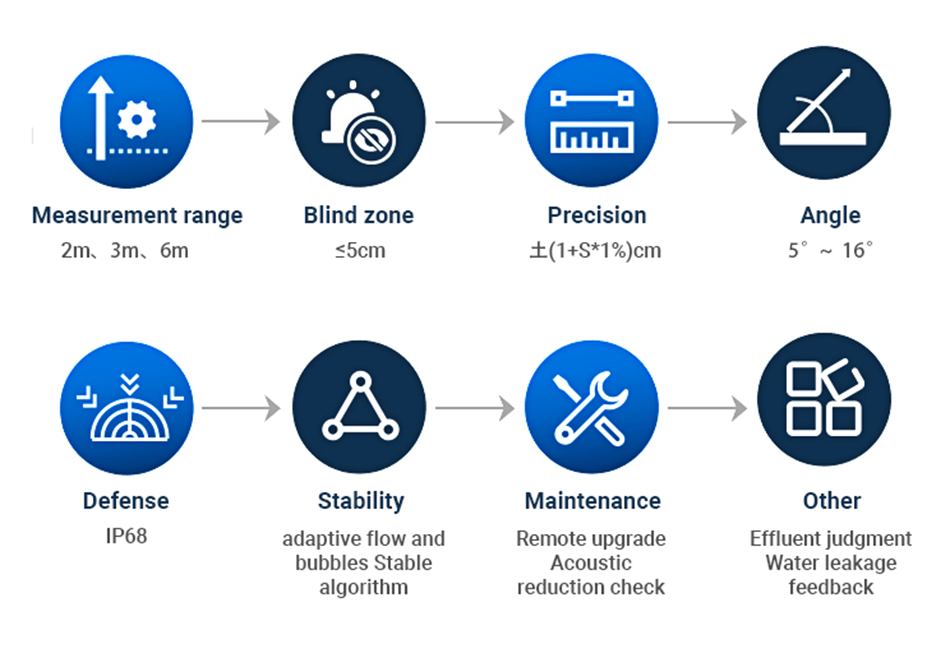
ʻO L08-module kahi mea kani kani ultrasonic e pale aku ai i ka pilikia i hoʻolālā ʻia no nā noi ma lalo o ka wai.Loaʻa iā ia nā pōmaikaʻi o ka liʻiliʻi liʻiliʻi, wahi makapō liʻiliʻi, kiʻekiʻe kiʻekiʻe a me ka hana wai maikaʻi.Kākoʻo i ka protocol modbus. Aia nā ʻokoʻa like ʻole, Angle a me nā kikoʻī ʻāpana makapō no nā pono like ʻole o nā mea hoʻohana e koho.
Nā ʻāpana kumu:
Huli i nā wahi ʻeha, hana hou a uhaki
Pehea e hoʻoikaika maikaʻi ai i ka lopako hoʻomaʻemaʻe wai ʻauʻau ma o ka mea ʻike ma lalo o ka wai, a hoʻokō i nā holomua ʻenehana hiki ke hoʻokō ʻia, ka hoʻohui pū ʻana o nā lawelawe a me nā solutions.Dianyingpu i kāna noiʻi a hoʻomohala . nā wahi ʻeha o ka mākeke a me nā mea hou e wāwahi ai.
(1) ke kumu kūʻai kiʻekiʻe, ʻaʻohe ala e hoʻolaha i ka noi o nā huahana mea kūʻai aku: nā mea ʻike ʻike ma lalo o ka wai i kūʻai ʻia ma ka home a ma waho, ke kumu kūʻai mai nā tausani o yuan. ʻaʻole hoʻohana nui ʻia i kēia manawa.
Hoʻohui pū ʻia me nā koi kumu kūʻai o nā robots mea kūʻai aku ma lalo o ka wai, ua noiʻi kūʻokoʻa ka ʻoihana a hoʻomohala i nā ʻāpana hoʻohālikelike transducer, localization o nā mea kumu, a me ka ʻike hana nui.Ua hōʻemi ʻia ke kumukūʻai ma lalo o 10% o ka ʻoihana, e hoʻomaka ana i ka lawe ʻana i nā mea ʻike i lalo o ka wai i nā mea uila uila.
(2) ʻAʻole hiki ke hoʻohālikelike ʻia nā ʻāpana sensor ma ka mākeke: mamao loa kahi sensor, liʻiliʻi ka wahi makapō, a ʻaʻole i loaʻa nā ʻāpana kūpono o ka Angle ma ka mākeke, e koi pinepine i ka hui ʻana o nā ʻano ʻano like ʻole, a kiʻekiʻe ke kumukūʻai hui.
Hoʻokumu ʻia kahi transducer multi-beam pālua, e hoʻonā i nā ʻāpana kiʻekiʻe o ka mamao, kahi makapō a me ke kihi.
①ʻO ka multi-beam Angle kokoke i 90 °, a hiki i ka laulā ke ʻoi aku ma mua o 6m, e hālāwai me ka wahi makapō i loko o 5cm, a kiʻekiʻe loa ka hoʻohālikelike ʻana o nā hiʻohiʻona noi.
② ʻO ka mea nui o ka mea kani kani ultrasonic ʻo ia ka ceramic plate transducer, ua hoʻohana ka huahana i ke alapine radial a me ka mānoanoa o ka papa hana hoʻolālā akamai, a laila ma o ka hoʻololi ʻana a loaʻa i ka hoʻololi kānana band-pass, ka radial frequency resonance frequency. He haʻahaʻa, he nui ke ana ʻana, he kiʻekiʻe ka mānoanoa o ke alapine resonance, ikaika ke komo ʻana, mamao ke ana ʻana a mālama ʻia nā ʻāpana o ka wahi makapō liʻiliʻi.
(3) I loko o ka paʻakikī o lalo o ka wai ʻaʻole paʻa: inā he wai turbidity, kahe nui o ka wai, lalo o ka mauʻu wai lepo, hāʻule ka ʻikepili ʻike, ʻo ia ka hopena ʻaʻole hiki i ka robot ke hoʻoholo i ka hana me ka naʻauao.
Hoʻoholo ʻia ka pilikia i hoʻohana ʻia i loko o ka wai paʻakikī e ka hui akamai o ka pālua-frequency multi-beam a adaptive algorithm a me ka hoʻoponopono kānana Kalman.ʻO ke kūlana kiʻekiʻe o nā pono o nā alapine like ʻole, multi-beam intelligent drive, diversification of working modes, power, angle, signal quality hiki ke hoʻololi i nā loli.
Hoʻolālā huahana a me ka hana:
(1) maʻalahi ke ʻano i ka nānā ʻana, liʻiliʻi i ka nui, pono ke kau ʻana i ka lua i ʻōlelo ʻia i loko o ka pūpū e hoʻopaʻa ai i ka nut, pili i ka ʻikepili puka maʻamau o nā lako e hōʻike ana i ka pau ʻana o ka hoʻokomo ʻana;Ma hope o ka mālama ʻana, pono e hoʻohuli i ka nut e wehe i ka sensor, hana maʻalahi, hoʻemi i ke kumu aʻo o ka hoʻonohonoho ʻana a me ka mālama ʻana.
(2) ke kaʻina hana huahana, hoʻohana ka transducer i ka ʻenehana hoʻopili ʻole, pani ʻia i hoʻohui ʻia.Ke hoʻohana nei ke kaapuni kūloko i ka potting epoxy resin glue i uhi piha ʻia, hiki i ka hopena wai ke piʻi i ka pae IP68.
Ka noiʻiikūʻokoʻalyahana hilinaʻi
I ka hoʻomohala ʻana o ka sensor, ua hoʻopaʻa pinepine ka hui R&D i nā ʻāpana multidimensional e like me ka paʻa o ka ʻikepili, ka mana kahe o ka wai, ka pinepine a me ka hana.A hana ʻia nā hoʻāʻo multidimensional i hui pū ʻia me nā kūlana hana maoli o ka lopako hoʻomaʻemaʻe wai e hoʻomaikaʻi hou aku i ka hoʻololi ʻana o ka sensor i ke kaiapuni a me nā kūlana hana.
I ka manawa like, ua hoʻomau mau ʻo Dianyingpu i ka weliweli o ka ʻenehana, lalo o ka wai e hoʻonui i ka ʻike e like me ke ana ʻana, ke hoʻohālikelike ʻia me ka hoʻolālā a me ka debugging, ʻoi aku ka nui o ka hana a me ka calibration, synchronously hoʻomohala i kahi hoʻonohonoho piha o ka hoʻāʻo a me ka ʻōnaehana calibration.
Ma muli o ka ʻōnaehana hoʻāʻo a me ka calibration, ua loaʻa ka sensor i nā hoʻāʻo hilinaʻi e like me ke kiʻekiʻe kiʻekiʻe a me ka mālama haʻahaʻa kiʻekiʻe, ka hoʻāʻo ʻana i ka wela a me ke anuanu, ka hoʻāʻo ʻana i ka paʻakai, ka hoʻomaʻamaʻa UV wikiwiki ʻana, ka hoʻoheheʻe ʻana o ka huʻu, ka hoʻāʻo ʻana i ka wai (hoʻāʻo ʻia i lalo o ka wai corrosion test) , ka ho'āʻo wai hoʻoheheʻe ʻana i ka wai, i hana ʻia i kēlā me kēia prototype iteration.
Ma hope o ka hoʻohui ʻia ʻana o ka sensor me ke kino robot, hoʻāʻo ʻia ka hana o ka mīkini holoʻokoʻa no nā kaukani mau hola i hui pū ʻia me ke ʻano hana maoli o ka robot.ʻOi aku ka nui o ka loaʻa ʻana o kēia sensor i ka hana nui ma mua o 99%, i hōʻoia ʻia e ka hana mākeke o ka hana batch.
Hoʻohui ʻia, e hoʻomau ʻia ka L08hōʻano hou
E noʻonoʻo i ke ala hoʻomohala o nā mea ʻike i lalo o ka wai: noiʻi, hoʻohui, hana hou, hōʻoia.ʻO kēlā me kēia node ka mea hou wiwo ʻole, ka ʻimi paʻakikī, a me ka hōʻiliʻili waiwai o ka mana ma ke kahua o ka ʻenehana.ʻO L08 ka huahana mua loa o ka ʻoihana ma lalo o ka wai ultrasonic ranging noi.E hoʻolauna ka hui i nā huahana hou aʻe e pili ana i ka robot underwater underwater obstacle a me ka ʻimi hohonu.
I ka wā e hiki mai ana, me ka hoʻolaha ʻana i nā lopako i lalo o ka wai, nā mea ʻike ma lalo o ka wai e like me ke kākoʻo koʻikoʻi no ka ʻike naʻauao o nā robots i lalo o ka wai, ʻoiaʻiʻo e lawe mai i nā loli nui i ka ʻoihana a me ke kahua.
Ka manawa hoʻouna: ʻAukake-04-2023